Previous installments of this series have looked at operational design domains and the importance of ensuring safety when road conditions make it difficult to continue autonomous driving, utilizing minimal risk maneuvers. Developing autonomous driving systems presents challenges that require a different approach from traditional automotive development, especially when it comes to software. This installment touches on Autoware from the perspective of open-source development.
Autoware is composed of the following stacks:
- Sensing
Processes information from sensors such as LiDARs, cameras, and radars. - Perception
Receives sensing results and recognizes the vehicle's surrounding environment. - Map
Provides map information to other stacks. - Localization
Determines the vehicle’s position using sensing and map data. - Planning
Determines the driving path. - Control
Issues commands for acceleration, braking and steering based on planning results. - Vehicle interface
Receives vehicle commands and publishes vehicle statuses.
Autoware performs all of these processes simultaneously to enable autonomous driving. It is fully open source, with all related information and manuals for installation and usage freely available. The source code is stored in the Autoware Foundation's public repository on GitHub, a platform for sharing and collaborating on software projects. This openness means anyone can easily access and use Autoware to suit their needs.
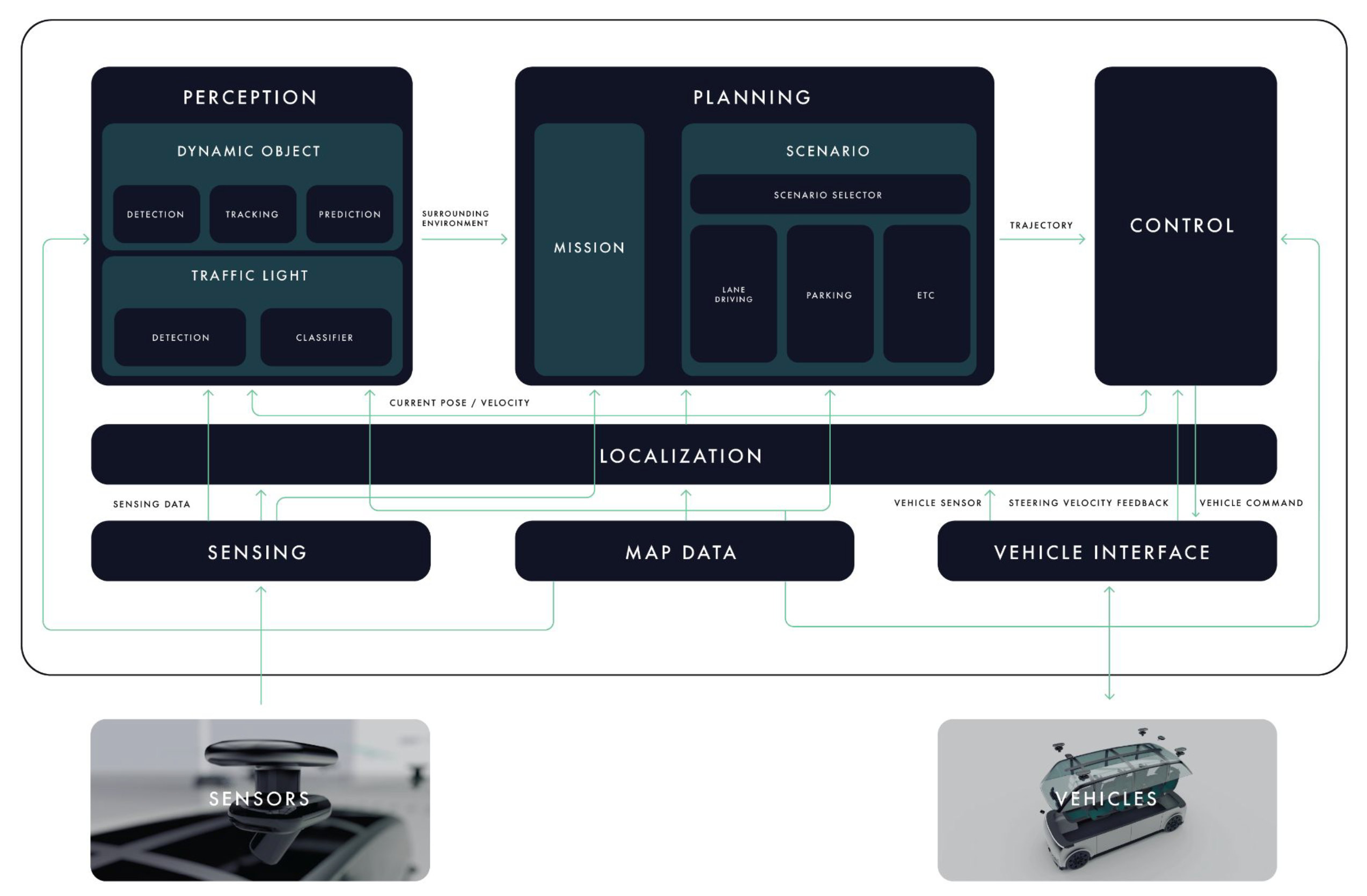
Each stack from the architecture diagram is stored in GitHub directories. While the architecture diagram simplifies the details, the actual software components of Autoware are more granular and interact in complex ways. Each stack comprises much more detailed software components.
Understanding the intricacies of Autoware's architecture is just the beginning. In the next installment, we’ll explore simulation tools, including the open-source digital twin software AWSIM. These tools play a crucial role in recreating real-world environments, enhancing the accuracy and effectiveness of autonomous driving technology.
Toshihide Ando | TIER IV Fellow
Toshihide joined TIER IV in 2019, where he has served in roles including vice president of technology before assuming his current position as fellow. Previous experience includes software development and R&D at a major Japanese automotive parts manufacturer.
TIER IV is always on the lookout for passionate individuals to join our journey. If you share our vision of making autonomous driving accessible to all, get in touch.
Visit our careers page to view all job openings.
If you’re uncertain about which roles align best with your experience, or if the current job openings don’t quite match your preferences, register your interest here. We’ll get in touch if a role that matches your experience becomes available, and schedule an informal interview.
Inquiries
- Media: pr@tier4.jp
- Business: sales@tier4.jp
Social Media
X (Japan/Global) | LinkedIn | Facebook | Instagram | YouTube
More