CES 2024 (Jan. 9–12) was an exciting week in Las Vegas for the TIER IV team. We showcased multiple products and demos, introduced new global projects, and conversed with people across the industry. I’m Yu Asabe, an autonomous driving (AD) software engineer at TIER IV, and in this tech blog, I would like to share some of the highlights of my experience at this year’s Consumer Electronics Show.

Beautiful morning at the Las Vegas Convention Center’s West Hall
Strolling through the TIER IV Booth
Just as Day 1 of CES started, TIER IV’s spot in the West Hall was already attracting quite a bit of attention, with the booth size three times bigger compared to last year and a total of five live demos being showcased. Overall, our booth was separated into three sections: one side displaying one of our concept Robobus vehicles for our white-label Level 4 AD solution, “fanfare”, along with displays describing our Pilot.Auto and Web.Auto products. The opposite side was filled with demos of our Edge.Auto product, and the middle section served as a comfortable meeting space and general inquiries counter.

The Robobus was flanked by screens displaying information about Pilot.Auto, Web.Auto and “fanfare.”
The futuristic-looking Robobus was the center of attention on this side of the booth, with our team members providing visitors with explanations of our white-label mass production-ready vehicle solution “fanfare,” and our Pilot.Auto and Web.Auto product lineups.
Pilot.Auto is a full-stack AD software platform that is both scalable, microautonomous, and fully customizable. It is based on the open-source AD software stack called Autoware, and we at TIER IV enable our customers to develop all sorts of AD software solutions by building on top of this open-source project. Autoware includes everything from localization, sensing, perception, and planning to vehicle control. Pilot.Auto also comes with software tools and drivers for easy hardware integration. It is essentially a well-verified and validated version of Autoware that delivers the performance reliability necessary for commercial operations. Depending on different use cases, requirements, and operational design domains (ODDs), we can tailor Pilot.Auto to make it the perfect fit for each of our customer’s services.
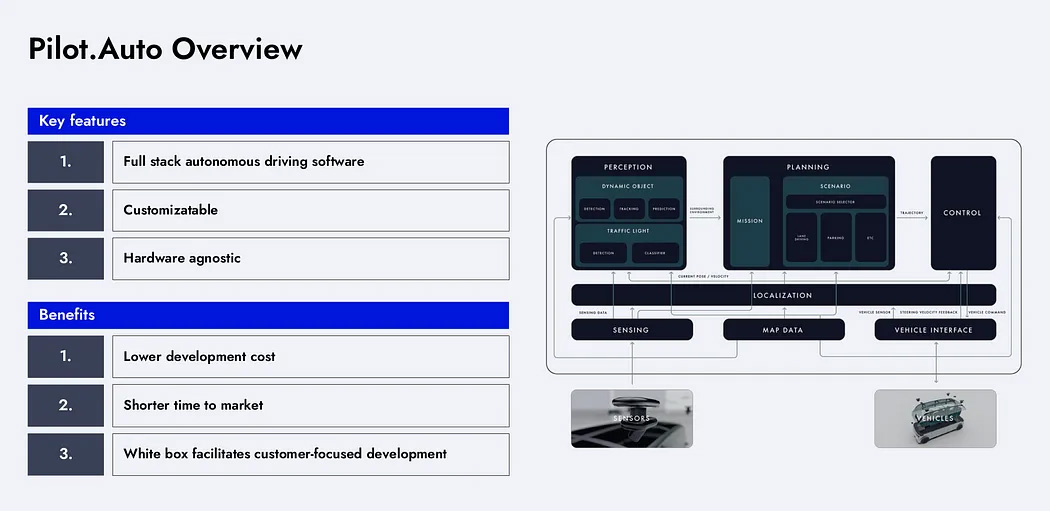
In 2023, TIER IV received Level 4 certification for its Pilot.Auto-based AD system, “AI Pilot”, from the Japanese government. Being the first in Japan to receive this certification for a full-stack AD system, we are now able to use our years of experience and knowledge to further pursue Level 4 autonomous driving in more complicated ODDs across the country.
When developing and operating AD solutions for commercial services, the efficiency and reliability of the development process and operation of the vehicle fleets become critical issues. For this, we have our cloud-native DevOps platform Web.Auto, which is a bundle of tools that streamline the development and operation of autonomous solutions.
The Web.Auto Evaluator tool is a CI/CD platform and MLOps toolchain that manages the test-driven development of software and ML models. Developers can create scenarios and run simulation-based tests that verify the features and functions of the AD software.
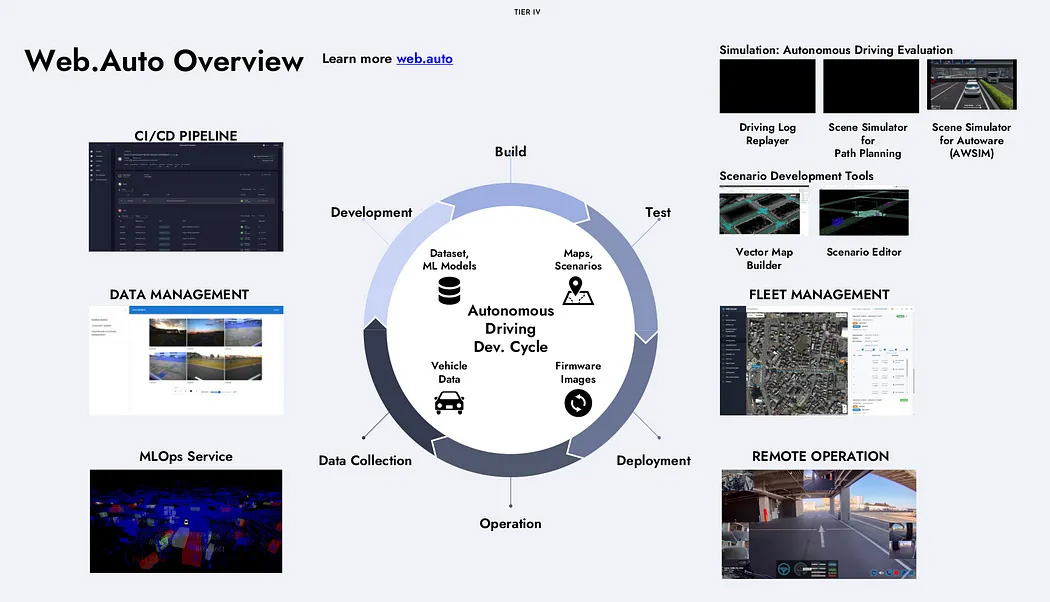
During the actual operation of vehicles, the Fleet Management System can be used to monitor the state of the vehicles in real time, checking their route or schedules and analyzing potential warnings in the system. Remote monitoring is also provided allows operators to continuously check the safety of the vehicle operation and to intervene in emergencies.
Reliable and privacy-preserving data collection is also important for the continuous improvement of the AD solution, where machine learning models can be re-trained, and post-operation data analysis can lead to further improvements in the software.
For more information about our various products and solutions, “Unraveling TIER IV’s autonomous driving solutions” is a good place to start.
During CES this year, TIER IV launched Edge.Auto, a reference platform designed for the rapid development of AD systems that includes sensor and ECU hardware components along with useful software tools and open-source sensor drivers. We had several demos at our booth that showcased our newest products along with their innovative capabilities.

Edge.Auto product demos filled the other half of the booth, with TIER IV members busy showcasing the lineup
One of them showed our in-house developed automotive cameras in action, comparing the performance of our C1, C2, and newly developed C3 cameras. Offering resolutions from 2.5MP to 8.3MP and a dynamic range of 120dB, these cameras are suitable for both advanced driver-assistance systems (ADAS) and AD applications, and other use cases requiring highly capable automotive-grade cameras. These cameras use a GMSL2 interface and come with features such as LED flickering mitigation.

Traffic light recognition with the C2 camera
Another demo showcased the interface conversion module that leverages ADI’s GMSL2 (Gigabit Multimedia Serial Link Generation 2), and converts streams of up to eight cameras into 10Gbit Ethernet. Not only is Ethernet widely available on more types of compute hardware as a standard interface, additional features including synchronization with other sensor devices such as LiDAR through PTP, shutter timing control, and image-data preprocessing/timestamping are also possible, making the module suitable for a wide range of complicated perception tasks.
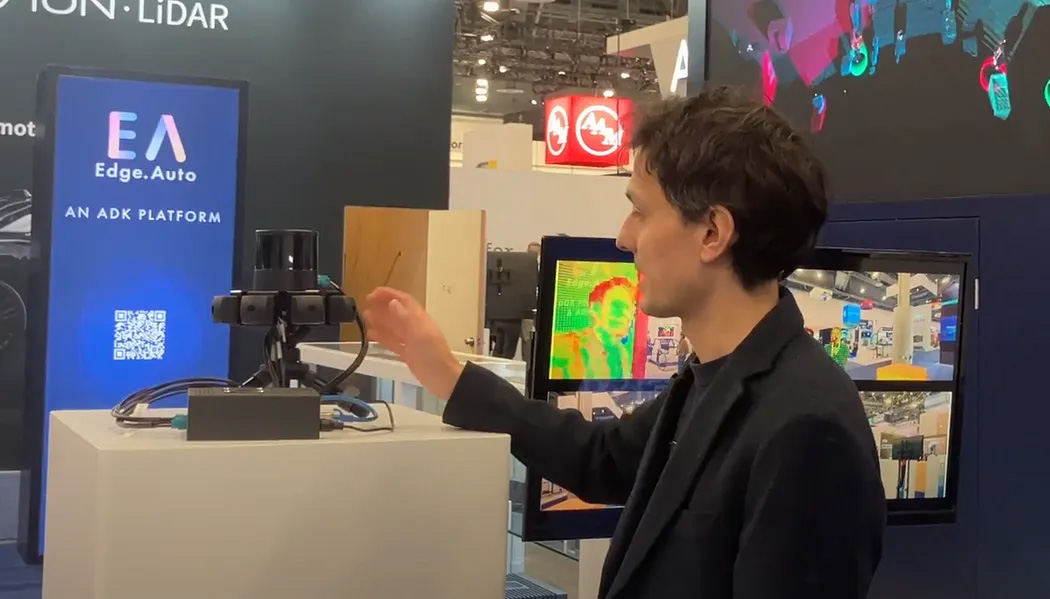
Research engineer David Wong runs through a demo.
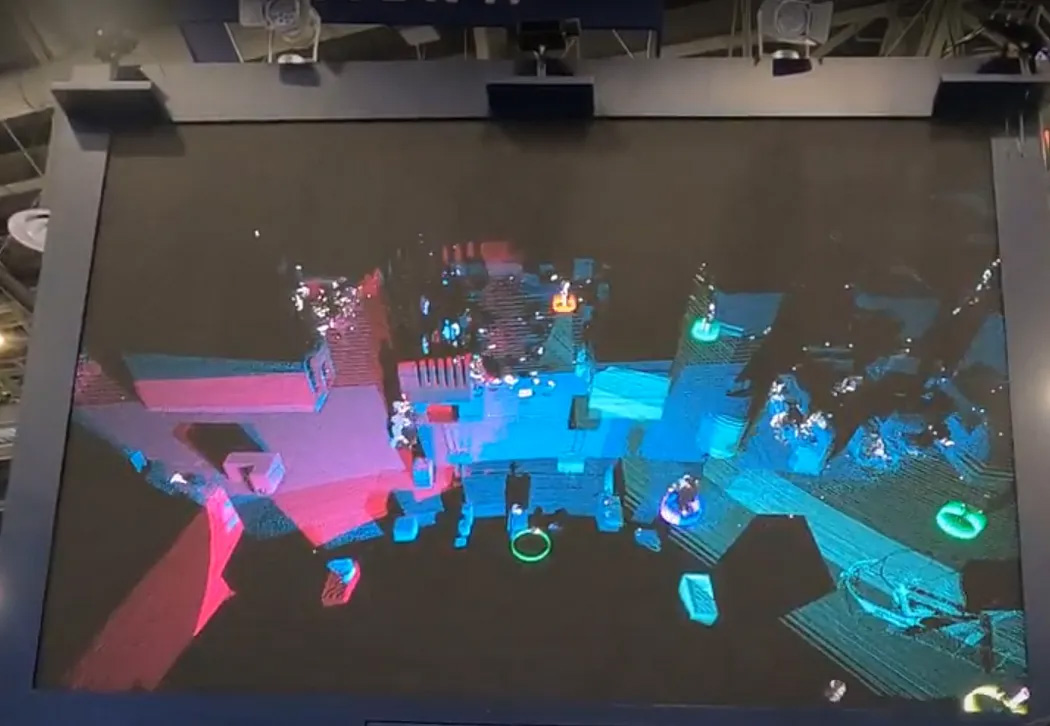
We also had an embedded Edge AI accelerator demo that used a camera and LiDAR as sensor inputs and a 2.5W Hailo-8 accelerator board to conduct inferencing for semantic segmentation. Multi-modal semantic segmentation was conducted on both the camera and LiDAR inputs individually, and also the fused data. It was able to show a level of sensor redundancy, where if either the camera or LiDAR input was blocked (by some obstruction for example), the semantic segmentation of the pedestrians continued to operate. On the first day of CES, we collected additional data at the booth and team members back in Japan used the data to train the model further to improve the demo performance.

A LiDAR-camera sensor fusion demo was conducted on the center tower, with live results displayed on large screens. At the top of the tower were three sets of a C2 camera and LiDAR, which were provided by different vendors. All the sensors in this demo used our universal sensor driver and perception system, and the positions were spatially and temporarily calibrated using the C2 cameras. The main task at hand here was pedestrian perception and tracking using edge ECUs. As people moved about the booth, you were able to see them recognized and tracked as they moved across the FoV of each of the LiDAR.
Another big announcement TIER IV made during CES 2024 is the initiation of the Co-MLOps (Cooperative Machine Learning Operations) Project that allows for the scaling of AI development for autonomous driving by sharing globally sourced sensor data and offering MLOps functions and Edge AI reference models to partner companies. Conventionally, companies have individually collected data and engaged in developing similar types of technology in order to collect the large datasets necessary for generating competitive AI models. ML expertise and data were all black-boxed, with the market being dominated by a few big companies. Smaller players in the industry (and startups) with limited resources have significant disadvantages in this data-collection and model-generation process, which has negatively impacted the scalability of technological development over the years. This new initiative, Co-MLOps Platform, aims to serve as the foundation for various companies and research institutions to pitch in and foster open innovation through open collaboration. It is a global platform where ML expertise and data can be shared, and the advancement of AD perception technologies can be harmonized and elevated collaboratively. All the data collected will be shared with appropriate privacy and security safeguards, and MLOps functionalities on these large-scale datasets will be shared among the members.
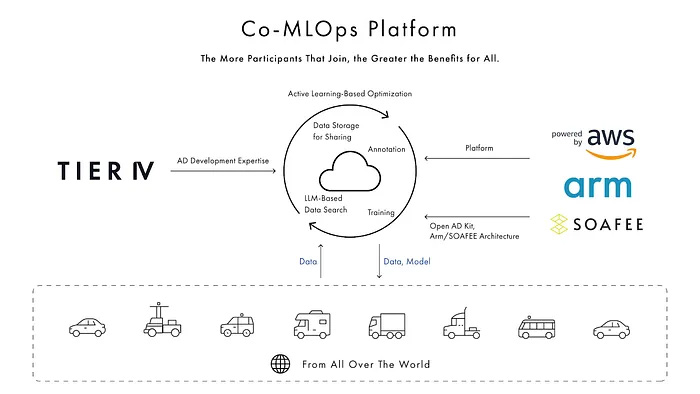
Members of the platform will have access to the shared dataset, with the ability to create baseline AI models at low operational expenses. Using the results of the platform as a starting point, everything from there on out can be done privately, enabling all members to set themselves apart.
The resulting output from the Co-MLOps Platform can then be integrated into Software-Defined Vehicle projects such as the Open AD Kit (more on this later) to realize more advanced SDV-based autonomous driving solutions.
Software-Defined Vehicles (SDV)
Throughout the automotive space this year, there was a great deal of focus on Software-Defined Vehicles (SDVs). The industry is seeing a shift toward a hardware-agnostic, software-centric approach for various vehicular applications and functions. One key component that received attention at the TIER IV booth is using Autoware as an application on top of the SOAFEE framework. SOAFEE, or the Scalable Open Architecture for Embedded Edge special interest group (SIG), is an industry-led collaboration between companies across the automotive and computing space to build together an open-source architecture for software-defined vehicles. The goal is to “create a shared platform for vehicles using a cloud-native architecture that accommodates multiple hardware configurations.” By stimulating industry collaboration to develop new software architectures and methodologies, new industry standards for the base vehicular hardware and software can be formed, which will maximize reusability and speed of delivery of more advanced AD and SDV applications. ADAS, in-vehicle infotainment, autonomous driving solutions, and innovative vehicular functions are all considered competitive areas that can create differentiated value.
The Autoware Foundation is working on the Autoware Open AD Kit, which brings the best practices of SDV development to the Autoware ecosystem and provides optimized hardware and software solutions. Automotive software and applications will be developed with a cloud-native approach, enabling software to be developed, tested, and validated on the cloud before being pushed to fleet vehicles through over-the-air (OTA) updates. Working closely with the Arm Automotive Platform, the Autoware Open AD Kit can be run on an Arm processor in the cloud and on the vehicle, providing a seamless transition from the cloud into the vehicle during deployment. This can unleash the power of the shift-left development methodology that can allow the ecosystem to develop and verify software before vehicle hardware platforms are even available.
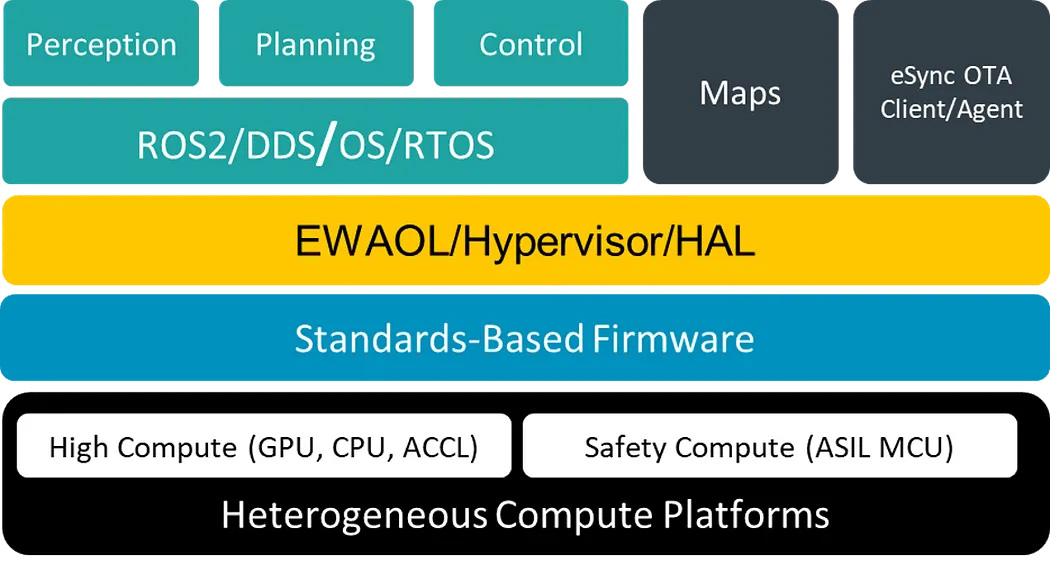
Open AD Kit Blueprint
During CES, we had a live demo with Arm that explained how we can deploy a new AD feature in a cloud-native way using containerized Autoware components and the Open AD Kit platform. We considered a scenario where a behavior change was necessary on the planner component of Autoware. Originally, when an object was detected in the ego-vehicle’s lane, the ego-vehicle would come to a full stop. However, we wanted to change the planner so that when an object is detected in the ego-vehicle’s lane, the ego-vehicle changes lane and proceeds forward.
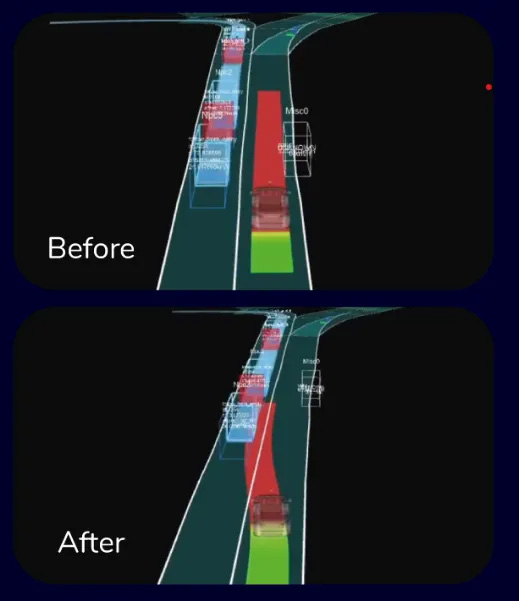
After the appropriate changes to the code have been made, three steps are necessary to complete the SDV validation and deployment cycle. First, functional validation is performed in the cloud through the simulator provided by TIER IV’s Web.Auto Evaluator solution. When the desirable function is validated, the validated planning container then moves to the virtual vehicle, which is a cloud-based SDV that has ISA-level parity to the edge hardware on the vehicle. After another round of simulation here proves the valid functionality, the container is deployed to the edge vehicle through OTA. Each step of this SDV cycle was demonstrated at different booths of our partners.
Tech talk at the TIER IV booth with Arm
Demo Rover from the Autoware Community
Throughout the week, we also had intriguing contributions from the Autoware community. Swedish-based startup, CanEduDev came to our booth with their newest eye-catching robotic vehicle, the “Demo Rover,” which they showed off next to our Robobus. At 1:5 scale, the sleekly designed Demo Rover provides a flexible platform for a variety of vehicle projects, with a complete CAN system integrated into a robust aluminum chassis. An Electronic Speed Controller (ESC) controls the high-performance brushless motors, and a steering servo enables either front or rear steering.
The F1Tenth project opened up the world of autonomous racing to a much wider audience, putting great resources into building the F1Tenth car and programming it with different algorithms for the whole AD stack. It enabled students and researchers to go beyond the world of simulation and actually test and validate their work on these relatively low-cost vehicles. On a larger scale, the open-sourced autonomous Go-Kart project at UPenn also delivered an exciting vehicular platform. CanEduDev’s “Demo Rover,” at 1:5 scale and with CAN integration, is a promising addition to these lineups of R&D and educational vehicular platforms. It can be retrofitted with many of the LiDAR and camera options on the market, and with a relatively high load capacity, it gives us more ECU options to work with.

With Hashem Hashem and Lars-Berno Fredriksson from CanEduDev, on our “Demo Rover” test-run
Testing the limits with high-speed autonomous racing
All the tech surrounding autonomous driving is exciting enough, but there is a whole new world out there when it is taken to extreme high-speed environments. On our third day at CES, some of the members from TIER IV and other AWF partners were able to see the Indy Autonomous Challenge (IAC) at the Las Vegas Motor Speedway. IAC organizes autonomous racing competitions, involving teams from universities around the world who program their own fully autonomous race cars and compete in a series of events at iconic tracks. IAC had a strong presence at CES this year with a large exhibition space in the West Hall, showcasing its newest technology and revealing its latest vehicle and full 2024 schedule.

The new IAC AV-24 race car
The IAC AV-24, the Indy Autonomous Challenge’s newest autonomous race car model, has been greatly improved from the previous AV-21, with cutting-edge hardware and software from its partner providers. This new high-speed vehicle is retrofitted with a variety of sensors, including 4 Luminar Iris sensors that provide 360-degree long-range LiDAR vision, Continental ARS540 sensors for radar perception, cameras from Allied Vision, improved GPS/GNSS with VectorNav sensors and PointOne solutions, and network communications from Cisco and Marelli. IAC has also partnered with dSpace to enable a high-fidelity “Digital Twin“ simulation environment where software driver training and head-to-head simulation racing challenges can be conducted. Using the SIMPHERA software, teams will be able to use simulation tools to develop, test, and validate their autonomous racing software capabilities at a much lower cost, before they transition everything to real race cars.
IAC AV-24 Intro Video
Racing at high speeds and operating the vehicle at its limit presents a multitude of new issues and challenges for the teams, with precise control necessary for steering at high speeds, vibrations on sensors such as LiDAR, and huge amounts of data that must be selected and processed effectively. Depending on the racing track, GNSS reception can deteriorate due to tree coverage or obstructions, and at extreme speeds, even a split second of increased measurement error can lead to catastrophic results.
Not only is the tech important for the teams, but the strategy is too. The ego-vehicle must be controlled well at very high speeds, while it looks for ways to make it difficult for the opponent vehicle to pass.
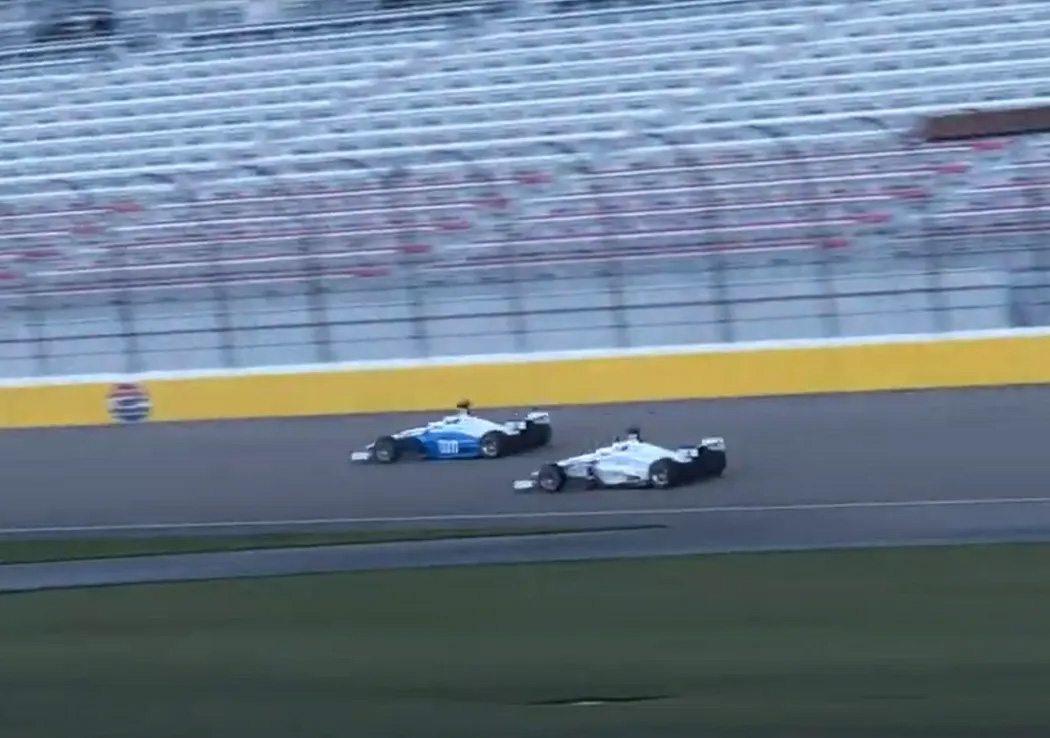
The moment a pass was successfully made right in front of us!
In a close head-to-head battle between TUM Autonomous Motorsport from the Technical University of Munich and Cavalier Autonomous Racing from the University of Virginia, TUM secured the first spot with maximum speeds of more than 150 miles per hour despite the cold weather affecting the tires and windy conditions. In the semi-final matchup between the TUM and KAIST teams, their two vehicles raced side by side in the turns, getting as close as 1.5 meters from each other.

Congratulations on the win!
As the sun set at the Las Vegas Motor Speedway, IAC unveiled its newest autonomous race car model in full-color LEDs. Based in the US state of Indiana, IAC’s engineering team has partnered with the industry’s leading autonomous hardware and software providers to develop the next-gen AD system.

Credit: Indy Autonomous Challenge
Other exciting highlights!
WeRide definitely impressed many of the visitors at CES, offering the only on-site test drive experience of an L4 autonomous minibus. The WeRide Robobus employed a fully autonomous design with LiDAR, HDR cameras, mmWave radar, and the ability to carry up to ten passengers despite its rather compact size. Going up to around 40 kilometers per hour, the ride seemed pretty smooth overall in the starting/stopping control and traffic light detections.
Next-gen LiDAR, such as 4D LiDAR (including AEVA’s FMCW-based device and Altos Radar’s Altos V Series) and SPAD LiDAR were also on display. In addition to the x, y, z coordinates of conventional 3D LiDAR, 4D devices enable the measurement of velocity information. This, combined with our perception pipelines that are already being extensively developed, can lead to further improved accuracy and computational speed.
The demos over at Luminar were also quite impressive. It debuted its Automatic Emergency Steering (AES) capabilities using the new Iris+ LiDAR. Luminar’s “Proactive Safety” system provides high-confidence detection of obstacles on the road and low-latency reaction time to enable the vehicle to avoid collisions at high speeds without direct driver intervention.
Since Luminar announced its acquisition of Civil Maps, a 3D LiDAR data mapping company, last year, it has sought to create an accurate, comprehensive, up-to-date map of the world in 3D. Using production vehicles powered by Luminar, a high-definition 3D map of the world can be created and automatically updated. These 3D maps are imperative for the next generation of ADAS and AD technology, improving vehicle safety and enabling the systems’ more accurate understanding of the world around them. Luminar had a demo that spanned the entire area around the convention center in Las Vegas where multiple Luminar-equipped vehicles roamed the nearby streets and successfully mapped the most up-to-date state of the environment in a matter of hours.
Of course, Sony Honda Mobility’s fancy and futuristic prototype of the “AFEELA” was a hot topic throughout CES as it was introduced onto the stage during the press conference, remotely controlled via a PS5 Dual Sense controller.
Throughout the West Hall, we sensed a stronger presence of newly emerging EV makers, with VinFast introducing its EV concept and Togg showcasing its new T10F sedan model.
Unpacking the Experience
Overall, CES 2024 was an action-packed, exciting week for me as I tried my best to accurately explain and promote the products and solutions that we provide at TIER IV to as many visitors and potential partners as possible. At the same time, it was an excellent opportunity to navigate the sometimes complex dynamics of the ever-changing automotive industry, learning about what many of these companies and teams provide and how they intertwine with each other. Throughout the entire automotive space, we saw many familiar faces, but there were also many global startups newly emerging into the field. The spotlight is shifting from traditional OEMs and the car itself, to more software-focused players that have their eyes on advancing L3+/L4 AD solutions.
TIER IV is broadening its influence in the global field, too. Team members were (happily) surprised by the number of people visiting our booth who were already familiar with TIER IV or Autoware, and wanted to seek partnerships or continue conversations.
Although we started as a software-focused autonomous driving company, we have expanded our scope to custom-developed hardware over the years, and now, we have gained tremendous experience with the full-stack development and operation of L4 AD solutions. With our various partners across the world and the members of the Autoware Foundation, we have pioneered the idea of open-source development, and have worked with the community to bring autonomous driving technologies to life.
Most importantly, though, over the few days in Las Vegas, I felt that CES is not just a mere convention where we prepare our booth and show off our technology, but it is the crossroads of the communities all of us are in, where different minds come together and discuss how we go from where we are now, to the world that we all envision. It is where our handshakes and cocktails spark new ideas that delicately but surely mature into tangible roadmaps that alter our future. Competition is prevalent, but at the end of the day, we are all just humans trying to find our way toward a safer, more convenient, and sustainable world through our common language (and love) of technology.

With the TIER IV team after our successful week at CES 2024
Yu Asabe
Software Engineer | System Component Team
Yu first joined TIER IV as a student engineer during his master’s degree program at the University of Tokyo’s Graduate School of Information Science and Technology. After completing his master’s, he joined TIER IV full-time. His current role revolves around the inter-component and external APIs of the open-source autonomous driving stack Autoware. He’s also involved in designing and implementing infrastructure-aided AD features using V2I communication, as well as organizing autonomous driving competitions using Autoware.
Join Our Open-Source Journey
TIER IV is always on the lookout for passionate individuals to join our journey. If you share our vision of making autonomous driving accessible to all, get in touch.
Visit our careers page to view all job openings
If you’re uncertain about which roles align best with your experience, or if the current job openings don’t quite match your preferences, register your interest here. We’ll get in touch if a role that matches your experience becomes available, and schedule an informal interview.
Media contact
pr@tier4.jp
Business inquiries
sales@tier4.jp
Social Media
X (Japan/Global) |LinkedIn| Facebook | Instagram| YouTube
More