前回までで、自動運転レベル4では運行設計領域(Operational Design Domain: ODD)を定義し、その範囲で自動運転を可能としている事、道路環境の変化等により自動運転の継続が困難な場合に安全を確保する必要がある事(MRM)を説明しました。このような自動運転システム実現の難しさにより、自動運転開発では従来の自動車開発とは異なるアプローチが必要になります。特にソフトウエア開発には大きな変化が求められていますが、今回はそれに先立ち、「Autoware」をオープンソースの切り口から見ていきたいと思います。
「Autoware」の説明は、The Autoware FoundationのAutowareドキュメンテーションサイトで公開されています。その中のアーキテクチャ概要を見てみると、「Autoware」のアーキテクチャは以下の図のような構造となっています。
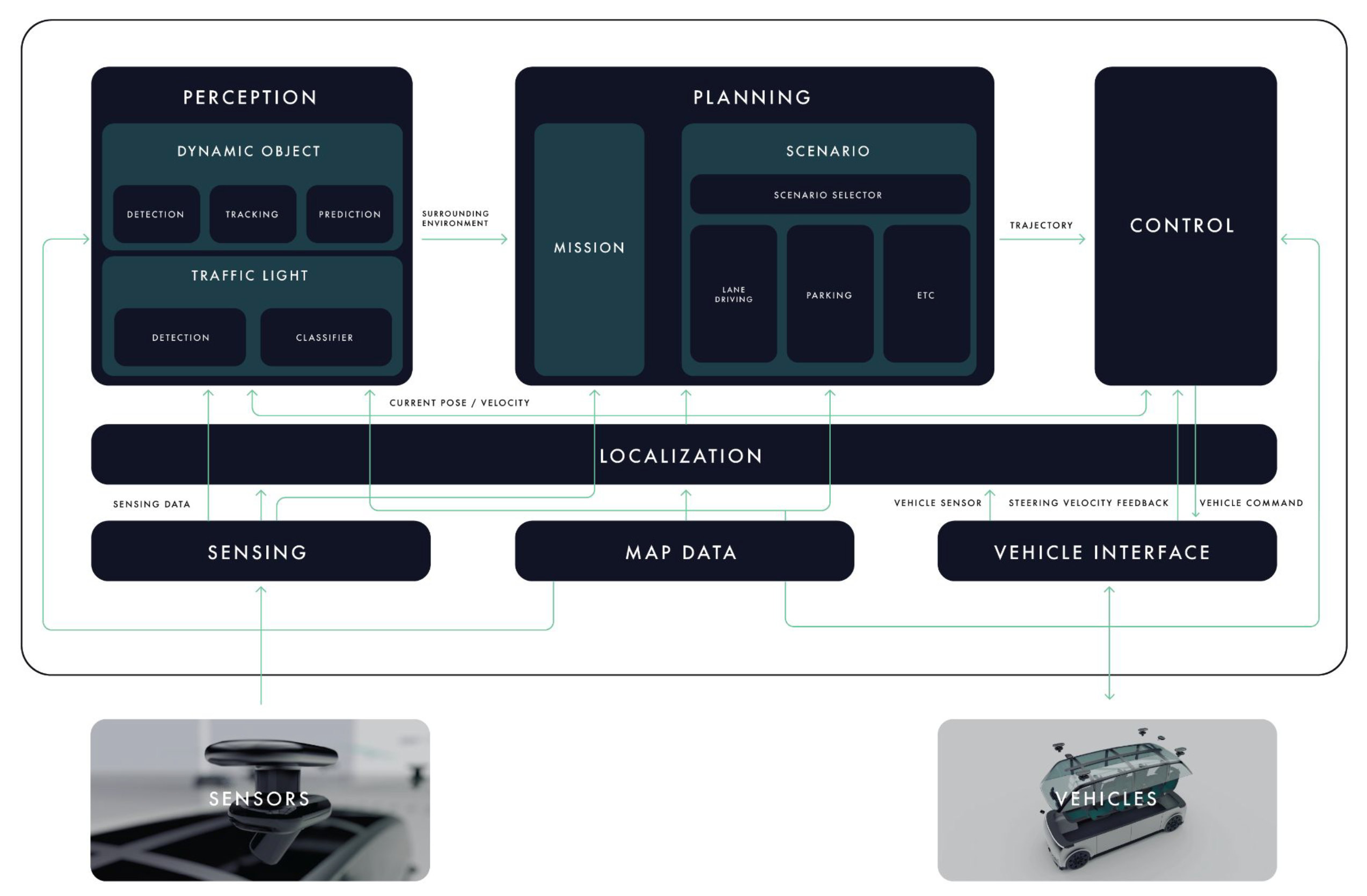
「Autoware」は以下のブロックから構成されています。
- Sensing
LiDAR、カメラ、レーダーなどのセンサーからの情報を処理 - Perception
Sensing 結果を受け取り、車両の周辺環境を認識 - Map
各ブロックに地図情報を提供 - Localization
Sensing 情報と地図情報より自車位置を決定 - Planning
これらの結果を受け取り、走行する進路を決定 - Control
Planning 結果に基づき車両の加減速やステアリング操作を指示 - Vehicle Interface
車両指示を受け取り、車両状態を表示
これら全ての処理を同時に実行しながら自動運転を行うソフトウエアが「Autoware」ですが、このアーキテクチャ図は設計図であり、いわゆる絵にかいた餅でしかありません。
このアーキテクチャを実際に実現したソフトウエアはソフトウエア開発共有サイトGitHubで公開されています。これはThe Autoware Foundationの公開リポジトリで、誰でも自由にアクセスすることができます。
このリポジトリを見てみると、前述のアーキテクチャ図で示された各ブロックが、control / localization/ map / perception / planning / sensing / vehicle の形でGithubに格納されていることが分かります。このディレクトリを下に辿っていくと実際のソースコードが現れ、「Autoware」の内容を見ることができます。そしてさらに、このブロックの中身を確認してみると、「Autoware」の各ブロックはアーキテクチャ図に書かれた粒度より、かなり細かいソフトコンポーネントに分かれていることが分かります。アーキテクチャ図では単純化して描いていますが、実際の「Autoware」のソフトコンポーネントはそれよりもかなり細かく分かれ、それらが複雑に関係しています。
このように「Autoware」は全てがオープンソースとして公開されており、さらに、「Autoware」のインストール方法や実行方法を記述したマニュアル類も併せて公開されています。「Autoware」は全ての情報がオープンになっており、誰もがそれにアクセスでき、誰もが利用する事ができます。
次回は、実世界の環境を再現し、自動運転技術の精度と有効性を高める上で重要な役割を果たす、シミュレーションツール AWSIMについて説明します。
Toshihide Ando | 安藤俊秀
ティアフォー・フェロー
2019 年入社。前職ではソフトウエア開発を中心に、自動車の各種電子システム製品などの研究開発に従事。技術本部バイス・プレジデントを経て、現職。
ティアフォーでは、「自動運転の民主化」というビジョンに共感を持ち、自らそれを実現する意欲に満ち溢れた新しい仲間を募集しています。
多くの職種で採用をしています。詳細は、ティアフォーの「求人ページ」をご覧ください。カジュアル面談をご希望の方は、応募する際に「カジュアル面談希望」と記載してください。
「どの職種で自分の経験を活かせるかが分からない」「希望する職種が見つからない」などの場合は、ぜひ「キャリア登録」をお願いします。
お問い合わせ先
- メディア取材やイベント登壇のご依頼:pr@tier4.jp
- ビジネスや協業のご相談:sales@tier4.jp
ソーシャルメディア
X (Japan/Global) | LinkedIn | Facebook | Instagram | YouTube
関連リンク