本ブログでは、カメラシステムの概要とティアフォーが開発するEdge.Autoの車載カメラについてシリーズで解説します。
前回は、イメージセンサーの動作の概略、グローバルシャッターとローリングシャッターについて解説しました。第4回となる今回は、車載カメラのインターフェースについて解説します。
高速インターフェース規格:MIPI
現代のイメージセンサーや画像処理プロセッサ(Image Signal Processor:ISP)といった、カメラに関連した多くの半導体の高速インターフェースは、Mobile Industry Processor Interface(MIPI)と呼ばれる規格に基づいています。これは車載向けに限らず、MIPIの名称の由来となっているスマートフォンなどのモバイル向け製品や、産業機器やデジタルカメラ向けの製品においても同様です。
MIPIを策定したMIPI Allianceは、モバイル機器の通信規格を標準化するために設立された団体です。しかし、近年はモバイル以外のアプリケーションでもMIPIを採用する製品が増えています。モバイル製品において増え続ける画素数と、それに伴うデータの広帯域化要求に応えるべく発展を続けてきたMIPI規格には、以下の特徴があります。
- 広いデータ帯域
- 低い消費電力
- シンプルなシステム構成
これらの特徴がモバイル以外の要求にも合致したため、MIPIは様々なアプリケーションで採用されています。車載カメラに用いられるイメージセンサーやISPについても、その大半がMIPIをインタフェース規格として採用しています。
MIPIには様々な規格が策定されていますが、カメラインタフェース向けの規格はCamera Serial Interface(CSI)になります。現在、CSI-2と呼ばれるバージョンが多くの製品に採用されており、CSI-2 v4.0までの策定が完了しています。
CSI-2は以下の5つのレイヤーで構成されます。
- Physical層
- Lane Management層
- Low Level Protocol層
- Pixel to Byte Conversion層
- Application層
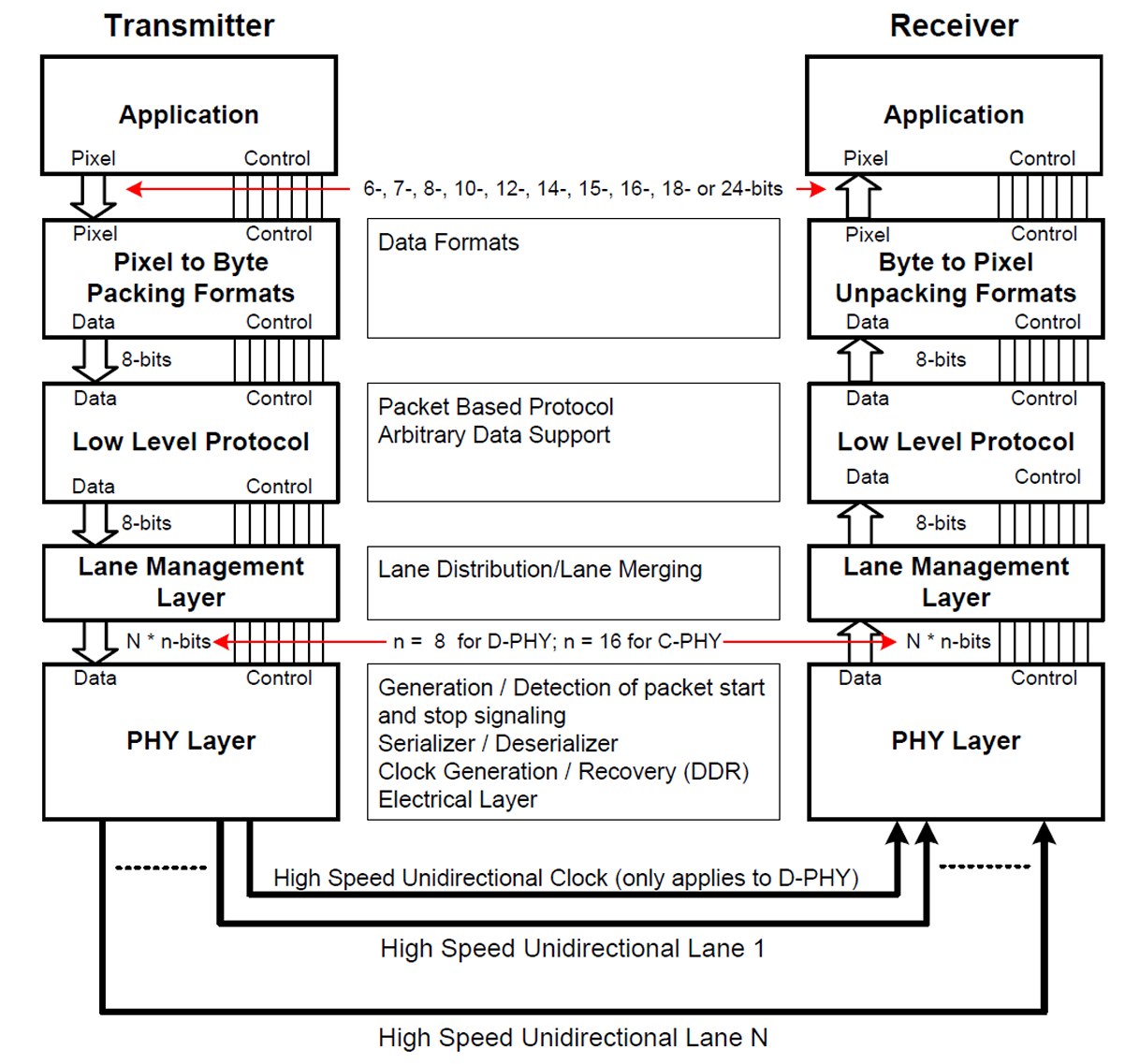 CSI-2のレイヤー(出典: NXP Semiconductors)
CSI-2のレイヤー(出典: NXP Semiconductors)
上記のうち、Physical層には、以下の4種類があります。
- D-PHY
- C-PHY
- M-PHY
- A-PHY
中でもD-PHYは車載用途で多く採用されており、D-PHY version 1.2は1 laneあたり2.5 Gbpsでの転送が可能です。従って、4 laneを使って転送する場合、合計10 Gbpsでのデータ転送が可能です。A-PHYについては後述します。
MIPIの特徴と車載カメラへの適用
MIPI、特にPhysical層にD-PHYを使う場合においての規格上の特徴と、車載カメラへの適用について説明します。
まず、MIPI規格の特徴に消費電力が低いことが挙げられます。これは、差動信号の振幅が±200 mVと小さいことにより実現されています。また、データ信号とクロック信号を別信号とすることで、シンプルなシステム構成を実現しています。
信号振幅については、振幅を小さくするとその分だけ信号伝送距離が短くなるというデメリットがあります。またシステム構成についても、データ信号とクロック信号が別信号である場合、伝送距離が長くなるとデータ信号とクロック信号の信号線長の差により、データ伝送エラーが発生する可能性があります。
これらの要因により、D-PHY v1.2における最大転送距離は15 cmとなっています。モバイル機器内での信号転送であれば、実用上伝送距離が最大15 cmであっても大きな問題がないため、欠点よりも利点を優先して規格が策定されたと言えます。
第1回目のブログで説明した通り、車載カメラにおいてはカメラとホストプロセッサの物理的な搭載位置が異なる場合があります。そのため、MIPIを用いてカメラから信号を転送することはできないので、他のインターフェースに信号を載せ替えて信号転送を行う必要があります。
SerDes技術を用いた長距離転送
長距離転送を行うための技術として、車載カメラでシリアライザ/デシリアライザ(Serializer/Deserializer:SerDes)と呼ばれる技術が広く用いられています。SerDes技術は、並列に送られる信号を直列化(シリアライズ)し、1対の伝送路を使って送信します。例えば、MIPI 4 laneの場合、4 lane+クロックで5本、そしてそれぞれ差動信号のため合計10本の信号が並列に送られます。このように信号を直列化する役割を果たすのがシリアライザ、逆に直列化された信号を並列に戻すのがデシリアライザです。
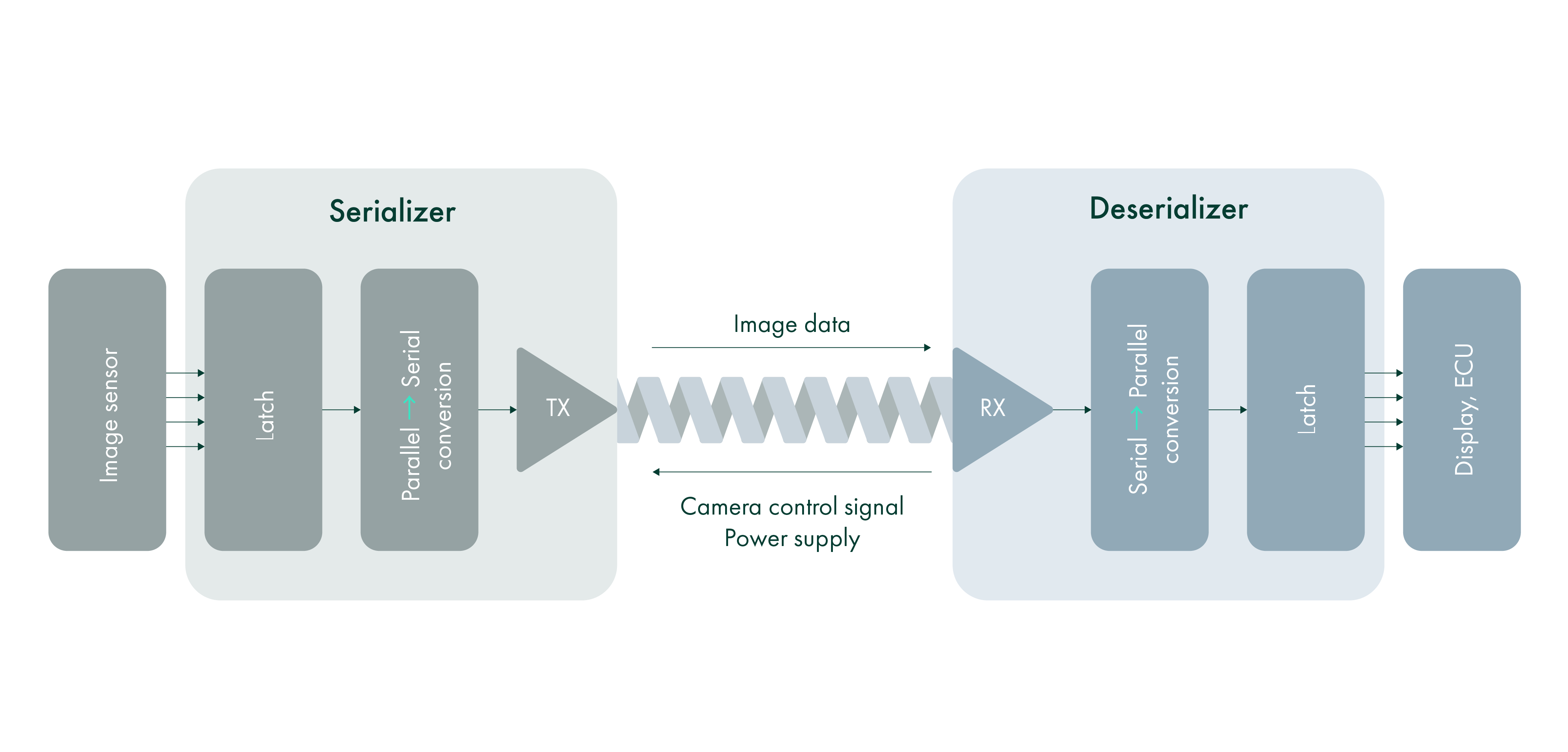
シリアライザとデシリアライザの関係
SerDes技術を用いることで、以下のような利点があります。
ケーブル本数の削減
カメラからElectric Control Unit(ECU)までの信号伝送を1本のケーブルで行うことがで きます。
配線の容易化
車内の配線数を削減できることで、ケーブルの取り回しがしやすくなり、車両製造を容易にします。
ケーブルのコストと重量の削減
ケーブルが少なくなることで、ケーブルに掛かるコストや重量(車両重量)を削減できます。
EMIの削減
信号伝送の際の立ち上がりと立ち下がりエッジが少なくなることにより、Electromagnetic Interference(EMI)性能が向上します。
伝送距離の長延化
SerDes技術を用いることで、より長い距離信号を伝送することができます。
車載カメラでは、Texas InstrumentsのFPD-LINK™と、Analog DevicesのGigabit Multi Serial Link(GMSL)™ が広く採用されています。このようなSerDes技術を用いることにより、カメラからECUへの画像信号の転送、ECUからカメラへの制御信号の転送、そして電源供給を1本のケーブルで行うことが可能です。
また、信号伝送距離も15 mと大幅に拡大することができます。ティアフォー製のカメラでは、GMSLの第2世代であるGMSL2を全機種で採用しています。
GMSL2と他技術の比較
GMSL2とカメラの主要なインターフェース規格を比較した表を以下に示します。
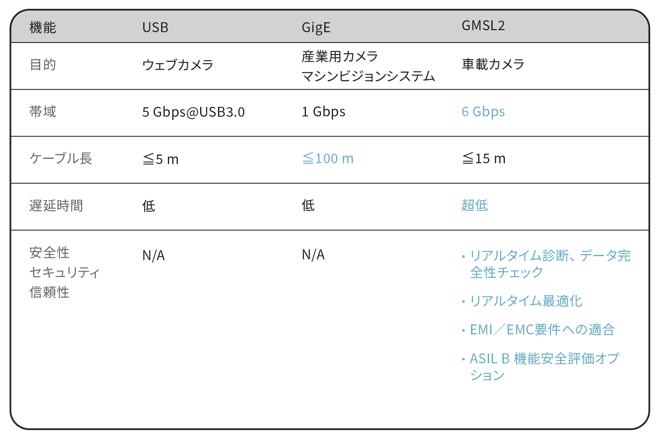
USB Video Class(UVC)規格に準拠するUSBは、ウェブカメラなどでよく用いられ、専用のデバイスドライバー無しに様々なデバイスと接続することが可能です。一方で帯域幅やケーブルの長さに制限があり、信頼性の点で他の接続方法と比べると劣ります。
Gigabit Ethernet(GigE)は産業用カメラやマシンビジョン向けカメラのインターフェースとしてよく用いられます。GigEは最大伝送距離が長く、Internet Protocol(IP)ベースのプロトコルのため、既存のIPネットワークとの相性が良いことが利点です。一方、IPベースのため、伝送帯域を完全に活用できず、高解像度・高フレームレートの画像データを転送するには圧縮が必要となり、遅延が発生しやすいという欠点があります。
GMSL2では非圧縮の信号伝送、十分なケーブル長(最大15 m)、および超低遅延という特徴を活かし、高帯域幅を実現し、高効率な伝送が可能です。また、システムの安全性と信頼性を強化する多数の機能を備えているため、ティアフォー製のカメラではGMSL2を採用しています。
オープンスタンダードの登場
GMSLやFPD-LINKは非公開な技術ですが、近年オープンな標準に基づくSerDes技術の標準化が進んでいます。ここでは、MIPI-APHYとAutomotive SerDes Alliance(ASA)を紹介します。
MIPI-APHYは、MIPI Allianceが先進運転支援システム(Advanced Driver-Assistance Systems:ADAS)や自動運転(Autonomous Driving:AD)、車内エンタテインメント(In-Vehicle Infotainment:IVI)といった車載アプリケーションに向けて標準化した規格です。データレートは規格上16 Gbpsまでサポートし、伝送距離も最大15 mになります。MIPI Alliance由来の規格であるため、CSI-2やDisplay Serial Interface(DSI)など、広く用いられている論理層のプロトコルとの相性の良さが特徴です。
ASAはBMWやFord、Volvoといった自動車メーカーや、ContinentalなどのTier 1サプライヤー、BroadcomやMarvell、Microchip、NXPなどの半導体サプライヤーが標準化を進める規格です。
いずれの標準化団体も、異なるベンダー間のインターオペラビリティ(相互接続性)の実現や、複数社からの購買を可能にすることによって購買コストの低減を目指して標準化を進めています。これにより、今後3〜4年以内に、これらのインターフェースを搭載した製品が本格的に市場に登場すると予想されます。
ここまで4回に渡り、車載カメラの概要、CMOSイメージセンサーの構造や基本的な機能、インターフェースについて説明しました。ティアフォーは「自動運転の民主化」をビジョンに掲げ、様々なレイヤーで自動運転に挑む皆さまを支援しています。本ブログが自動運転をはじめとする車載システムの「目」となるカメラシステムの理解を深める手助けになれば幸いです。
Edge.Autoの製品についてさらに学びたい方のために、さらなるブログを作成中です。配信を見逃さないよう、ティアフォーのニュースレターをぜひご登録ください。
ティアフォーでは、「自動運転の民主化」というビジョンに共感を持ち、自らそれを実現する意欲に満ち溢れた新しい仲間を募集しています。
多くの職種で採用をしています。詳細は、ティアフォーの「求人ページ」をご覧ください。カジュアル面談をご希望の方は、応募する際に「カジュアル面談希望」と記載してください。
「どの職種で自分の経験を活かせるかが分からない」「希望する職種が見つからない」などの場合は、ぜひ「キャリア登録」をお願いします。
お問い合わせ先
- メディア取材やイベント登壇のご依頼:pr@tier4.jp
- ビジネスや協業のご相談:sales@tier4.jp
ソーシャルメディア
X (Japan/Global) | LinkedIn | Facebook | Instagram | YouTube
関連リンク