こんにちは、ティアフォーでPlanning/Controlの開発をしている田中です。今回は、交通ルールによって速度を決定するモジュールの一部である死角手前での減速機能を紹介し、この機能が自動運転に与えるインパクトについてお話します。
背景・課題
通常走行時、Autowareは自車の制限速度にしたがって走行しますが、走行中のレーンに人や車が飛び出してきたときは衝突しないように緊急停止します。閉鎖空間や立ち入り禁止区域など、人が入れないような場所では飛び出しが起こりえないので考慮する必要はありませんが、公道では交差点でないところでも飛び出しは起こりえます。上限速度で走行していた場合は、万が一の飛び出しに対応できない可能性もあります。したがって、緊急停止時にきちんと停止できるかどうかは非常に重要な問題となります。そこで、死角手前から緩やかに減速する機能を開発しました。

想定シナリオ
自車が走行しているレーン付近に停車中の車両がある場合、その車両の裏が死角となって歩行者が飛び出してくる可能性があるため、停車車両が作る死角地点の十分手前から適切な減速を行います。
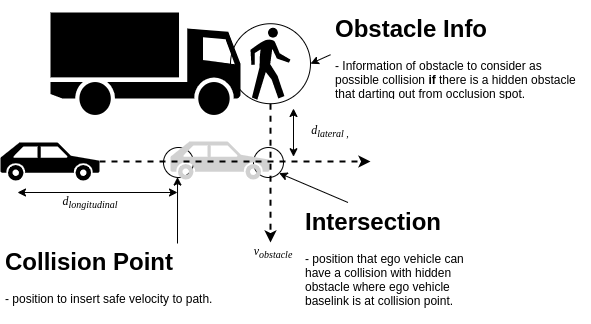
衝突前に緊急停止可能な上限速度をvebsとします。vebsは、フルブレーキの減速度aebsと歩行者が衝突地点にたどり着くまでの時間dlateral/vobstacle、システム遅延tsafeを用いて以下のように求められます。
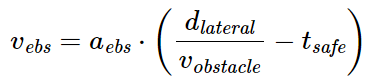
なお、ここでは死角から出てくる歩行者はvobstacleの速度で等速直線運動をするものと仮定しています。
次に、現在地点から死角地点まで一定のブレーキ量で安全に減速するための目標速度の上限をvpbs とすると、vpbsは現在の自車速度v0、死角までの縦方向距離dlongitudinal、死角手前での減速として許容できるブレーキ量apbsを用いて、等加速度直線運動の関係式から以下のように求められます。

理論上目標速度に向かって減速しきることが好ましいのですが、誤検出によって死角と判定されたものが急にできたときなどすべての死角に対応できないこと、急減速時の車内の人の安全担保、そして後続車からの衝突回避を考慮して上記の上限速度を用いています。
最後に、走行時に交通の妨げとならないための最低速度定数vminを後続車との車間距離dfollow、制限速度vlimit、後続車が減速を認識するのにかかる時間ssafeを用いて以下のように求めます。
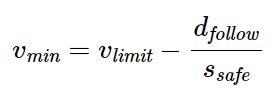
私有地や狭い道路であれば高速で走行する車両は少ないのですが、車の通行量が多い国道や大通りなどではある程度速度を出して走らないと交通の妨げになったり、後続車から追突されてしまうことが考えられます。
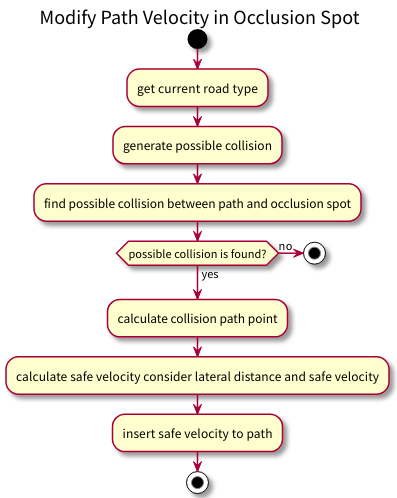
これらvebs、vpbs、vminを用いて、死角手前での減速計画は以下のようになります。
死角手前での減速フロー
最後に、死角手前での減速フローを載せておきます。
まとめ
このように、死角手前であらかじめ減速しておくことで予期せぬ事故を回避できます。今後もより安全な自動運転へ向けた減速計画について検討していきたいと考えています。
参考文献
Euro NCAP. European New Car Assessment Programme (Euro NCAP)—Test Protocol—AEB VRU systems, Version 3.0.4. Technical Report, 2021. https://cdn.euroncap.com/media/62795/euro-ncap-aeb-vru-test-protocol-v304.pdf
Yohei Fujinami, Pongsathorn Raksincharoensak, Dirk Ulbricht, and Rolf Adomat. Risk Predictive Driver Assistance System for Collision Avoidance in Intersection Right Turns. Journal of Robotics and Mechatronics, Vol.30, No.1, pp.15-23, 2018. https://doi.org/10.20965/jrm.2018.p0015
オープンソースのソフトウェアを一緒に開発していきませんか?
ティアフォーでは、「自動運転の民主化」というビジョンに共感を持ち、自らそれを実現する意欲に満ち溢れた新しい仲間を募集しています。
Media Contact
pr@tier4.jp
Share the post
LinkedIn | Twitter | Facebook | Instagram